
Robotics
Introduction
Videos and pictures of my autonomous routines and robots over the 4 year period I competed in VEX Robotics as team 1961Z.
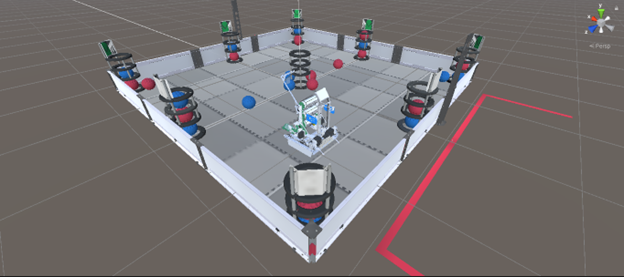
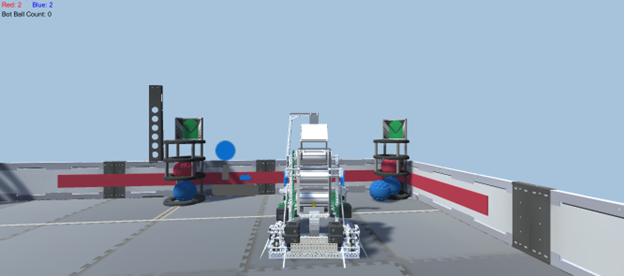
Simulation Platform
This project was an attempt to create a simulated environment in Unity to help train a machine learning algorithm. Then to port this algorithm into our competition robot and see how it would react. While I was not able to finish this project as I transitioned to college this was my stepping point into the research that I work on now with Drone SWARMS and how they are simulated.
The Years
Change Up 2020 - 2021
Change Up was one of the best years we had as a team we all took the culmination of failures and success over the years and built / coded a robot that show cased that learning.
Reveal Video:
 Due to copyright you can only view on youtube
Due to copyright you can only view on youtube
Coding Notebook:
Autonomous routines:
This showcases the auto-indexing feature which allows for the balls to be put at the specific height with out user input:
This showcases the 1 minute autonomous routine:
These videos showcase the 15 second autonomous routines: